
NASA wants to send QUADCOPTER DRONE to Titan. Oh to dream.
Shout out to NASA. Even if they’re like, totally underfunded, and wrangling with all sorts of bureaucracy, at least they come up with some pretty fantastic ideas. I don’t know how practical they are, and I generally regard them as science-fiction, but I’m on board. Like. A quadcopter drone on Titan? Sold.
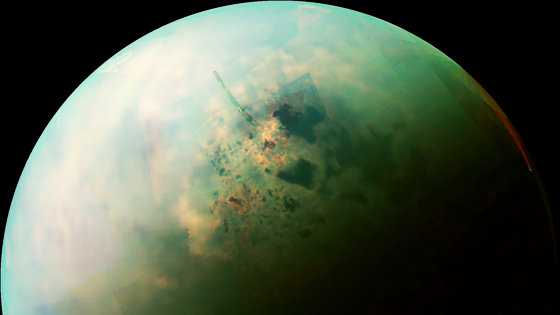
NASA wants to search Saturn’s moon Titan for life but they’re having trouble coming up with a good way to cover a large territory and obtain samples. Now they think they may have a good solution: A 22-pound quadcopter that will work from a mothership. After reading about it, it’s a really cool idea.
Larry Matthies—a Senior Research Scientist and the supervisor of the Computer Vision Group, in the Mobility and Robotic Systems Section of the JPL in Pasadena, California—thinks that this may be the only solution that can achieve mission objectives—the search for life or prebiotic chemistry in one of the places in the solar system more likely to have it—safely and at low cost and low risk.
A lander will not cut it because it can’t move. They need to explore this world. A balloon or an airplane can easily move, but they can’t be the solution because they can’t access the surface. And a large, long-range helicopter can work, but it is way too expensive and risky. So he combined all of these ideas and came up with something relatively low cost, low risk, and absolutely logical:
We propose a mission study of a small (< 10 kg) rotorcraft that can deploy from a balloon or lander to acquire close-up, high resolution imagery and mapping data of the surface, land at multiple locations to acquire microscopic imagery and samples of solid and liquid material, return the samples to the mothership for analysis, and recharge from an RTG on the mothership to enable multiple sorties.
Boom. He argues that this is only possible now because of the recent development in robotics and drones here on Earth:
Prior studies have shown the feasibility of aerial mobility on Titan for larger aircraft, from 10 to 400 kg, but none of these studies were in the size range we address and none addressed the daughtercraft, sampling, and recharging scenarios we address.
This concept is enabled now by recent advances in autonomous navigationand miniaturization of sensors, processors, and sampling devices. It revolutionizes previous mission concepts in several ways.
For a lander mission, it enables detailed studies of a large area around the lander, providing context for the micro-images and samples; with precision landing near a lake, it potentially enables sampling solid and liquid material from one lander.
For a balloon mission, it enables surface investigation and sampling with global reach without requiring a separate lander or that the balloon be brought to the surface, which has potential for major cost savings and risk reduction.
[io9]